
GNSS Constellations, Radio Frequencies and Signals
GNSS Constellations
| Constellation | Responsible Agency | Website |
| Global Positioning System (GPS) | Government of the USA | https://www.gps.gov/systems/gps/control/ |
| Global Navigation Satellite System (GLONASS) | Russian Federation | https://www.glonass-iac.ru/en/ |
| Galileo | European Union | https://www.gsc-europa.eu/ |
| BeiDou (Chinese for Big Dipper) | Government of China | http://en.beidou.gov.cn/ |
| Quasi Zenith Satellite System (QZSS) | Government of Japan | https://qzss.go.jp/en/index.html |
| Indian Regional Navigation Satellite System (IRNSS) /NAVIC | Government of India | https://www.isac.gov.in/navigation/index.jsp |
GNSS Constellations, Bands, Frequencies and Signals
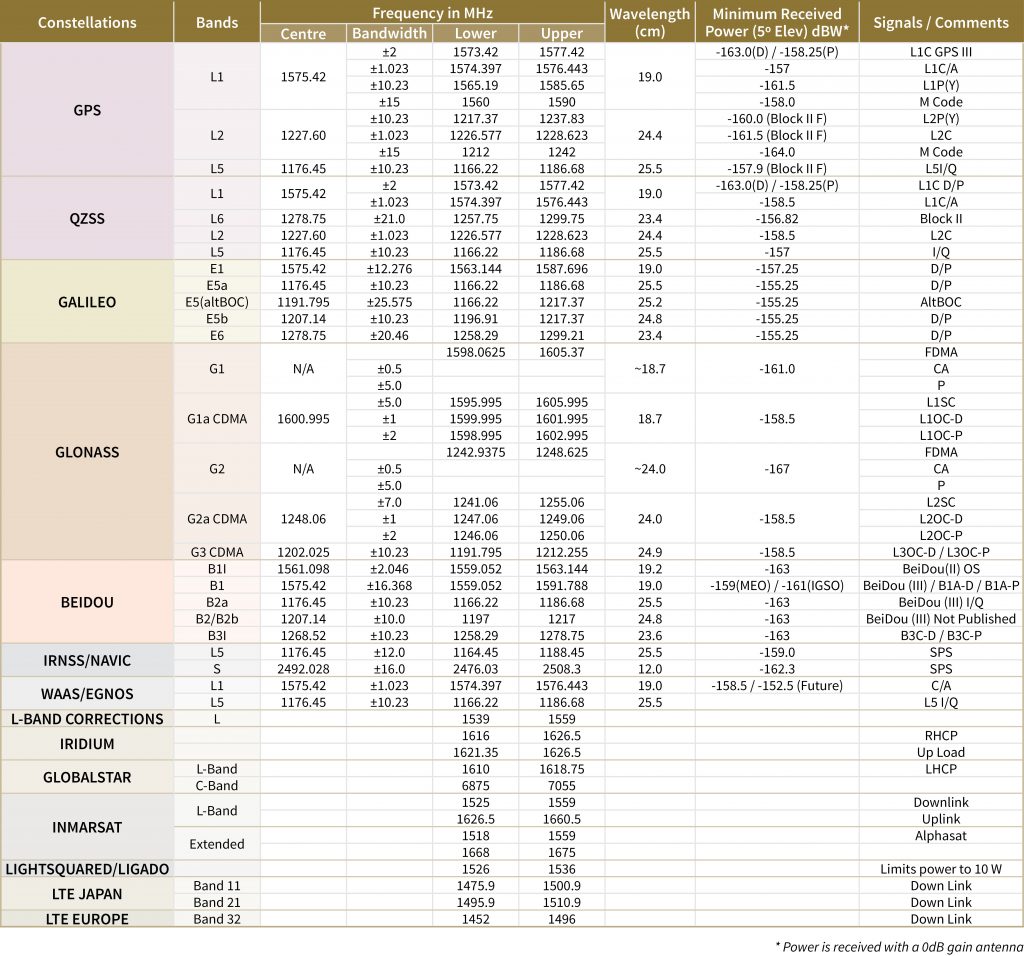
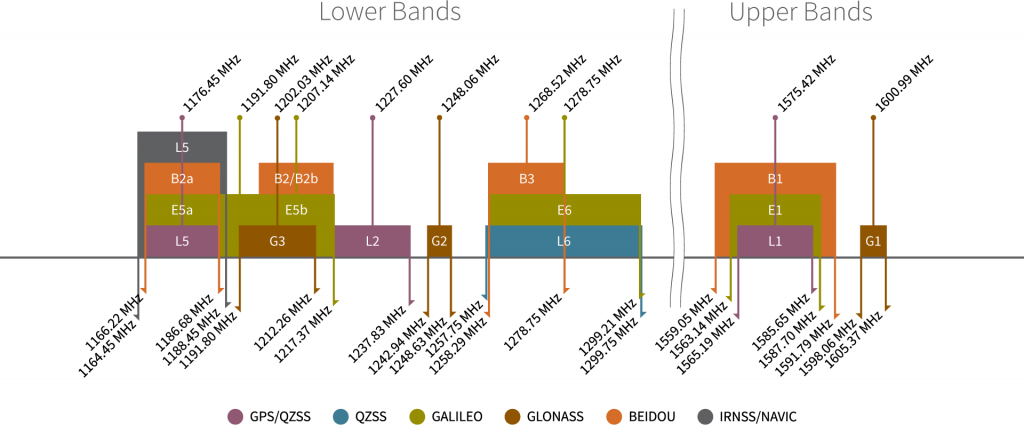
GNSS Frequencies
Get a Calian GNSS Mouse Pad
Bring all GNSS constellations to your workspace by requesting a FREE Calian GNSS Constellations, Frequencies, and Signals Mouse Pad.